
近日,第17届智能机器人与应用国际会议(The 17th International Conference on Intelligent Robotics and Applications, ICIRA2024)召开,会上颁发2024年International Journal of Intelligent Robotics and Applications(IJIRA)最佳论文奖,机器人研究所熊振华教授团队完成的“Autonomous Navigation of Mobile Robot in Radiation Environment with Uneven Terrain”论文获此荣誉。论文作者为硕士研究生黄颖、时晓雨及博士研究生周研,熊振华教授为通讯作者。

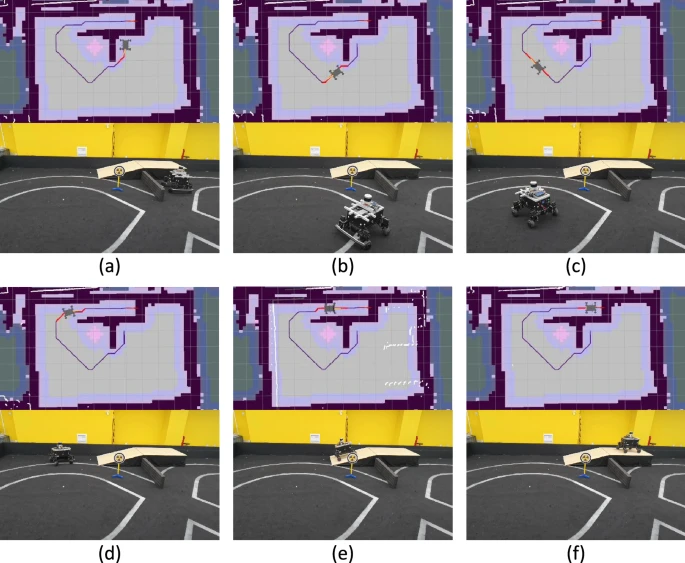
论文针对复杂涉核环境,提出一种移动机器人的自主导航方法,包括以辐射代价地图和坡度代价地图的多层代价地图作为路径规划器的输入,运用一种综合考虑路径、辐射和坡度影响的A*算法来构建全局路径规划器,实现了一种多传感器数据融合算法用于机器人的实时定位和运动控制,并通过仿真和实验验证了所提方案的合理性。研究成果为复杂核事故环境下移动机器人自主导航提供了新方案,旨在延长机器人工作寿命、提高机器人工作效率和运行可靠性。
International Journal of Intelligent Robotics and Applications(IJIRA)是由施普林格·自然集团(Springer Nature)出版的ESCI英文国际期刊,每年出版四期,旨在传播智能机器人领域的突出科研成果,探讨其未来应用前景,帮助人类社会应对能源、交通、人口老化、医疗保健、环境和安全等方面的挑战。
论文链接:https://link.springer.com/article/10.1007/s41315-022-00255-x
