
近日,2024年IEEE先进智能机电一体化国际会议(IEEE/ASME International Conference on Advanced Intelligent Mechatronics)召开,会上颁发2023年IEEE/ASME Transactions on Mechatronics最佳论文奖,机器人研究所熊振华教授团队与美国佐治亚理工学院Kok-Meng Lee教授合作完成的“Effects of Mechanical Scanning Speeds on Eddy-Current Detection of Cavity Defects”论文获此荣誉。论文第一作者为博士研究生郭政亚,熊振华教授和Kok-Meng Lee教授为共同通讯作者。
获奖证书
论文基于分布式电流源方法,建立了适用于探头连续运动扫描时电涡流检测的三维数值仿真模型,通过将带缺陷的原始问题转换为两个更易求解的子问题叠加的形式,提高仿真精度及效率。论文分析了磁场传感器位置、灵敏轴方向及扫描速度等关键参数在检测尺寸相对较小的孔洞缺陷时对结果的影响,同时评估了不同检测目标下的扫描速度极限,并对实际检测时可能遇到的信号干扰给出了相应处理算法,旨在克服基于逐点扫描测量引起的电涡流检测效率不足的问题。该研究工作得到了国家自然科学基金面上项目的资助。
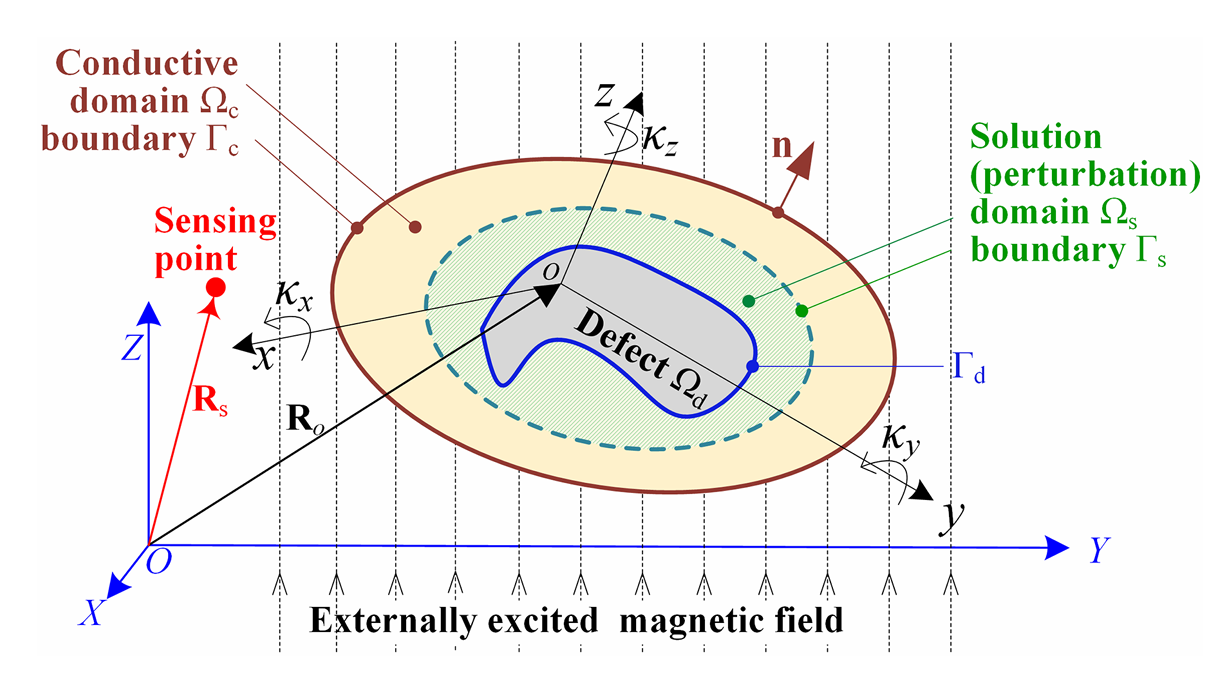
探头连续扫描时电涡流检测示意图
熊振华教授团队致力于机电运动控制、机器人技术及智能制造等领域的研究工作,近年来在IEEE Transactions on Robotics、IEEE/ASME Transactions on Mechatronics、IEEE Robotics and Automation Letters等国际期刊上发表多篇论文。
IEEE/ASME Transactions on Mechatronics是由美国电气和电子工程师协会(IEEE)和美国机械工程师协会(ASME)共同主办的机电一体化领域、中科院期刊分类一区的国际期刊。
论文链接:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9940440
